2024年9月10日,Betway必威西汉姆联人工智能与自动化系邀请北京理工大学教授蒋志宏进行了工程大师论坛讲座,主题为“人形机器人关键技术与发展趋势 ” 。
蒋志宏,北京理工大学智能机器人与系统高精尖创新中心教授、博导,中国人工智能学会高级会员,中国自动化学会平行控制与管理专业委员会委员,中国空间站大型机械臂专家组成员、空间站机械臂技术评估专家组成员、中国空间站贡献专家。主持了国家重点研发计划智能机器人重点专项、国家自然科学基金重点及联合基金重点和空间站机器人型号等项目,在轻量化大负载高精度7自由度力控型机械臂及双臂移动作业、空间站机器人航天员动力学控制及全身力控型人形机器人系统设计与控制等方面进行了重点研究与突破,在IEEE TRO等机器人期刊发表了学术论文100余篇,获得了军队和省部级科技进步二等奖各1项。在空间机械臂动力学与控制核心技术方面,支撑了中国空间站建设与发展;研制的双臂灵巧作业机器人和大负载特种作业机器人,在国家特种领域实现了重要技术突破和应用。
近来由于人形机器人的安全性、效率和复杂环境作业的能力有限,限制了在家庭和工业场景的应用。需要综合机构学、生物力学、医学和数学等学科,探索人类的复杂运动控制机理,为人形机器人仿人研究提供基础,坚持采取科学的系统研究思想和方法,以保持人形机器人不断有效持续进化。蒋教授从研究的背景和意义,关键技术研究与进展,以及发展趋势与展望展开的。
研究背景和意义:人机交互
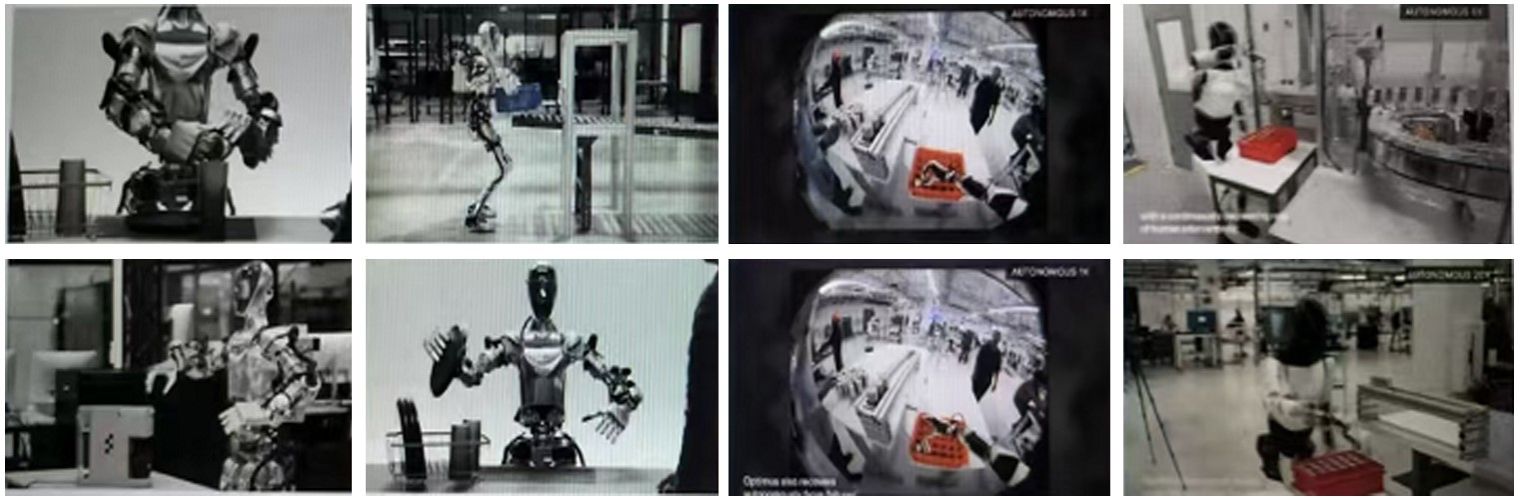
蒋教授介绍了智能感知、智能移动、智能操作、智能交互四大关键核心要素,也分享了人形机器人双臂协作、运动控制、复杂接触等关键技术研究进展和未来发展趋势。其中复杂接触包括接触交互和非接触交互,而接触交互是人形机器人实现与人及环境的“安全、柔顺、实时、灵巧”移动与操作的挑战与机遇。蒋教授分享了北京理工大学对人形机器人的关键技术研究和进展,以及对人形机器人的展望。
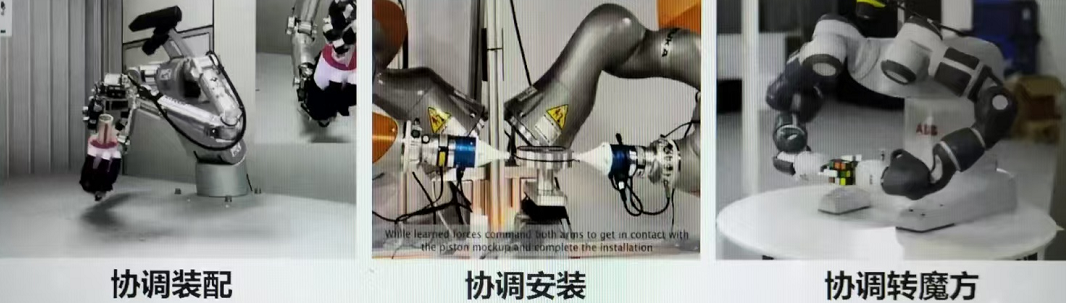
关键技术:复杂接触作业
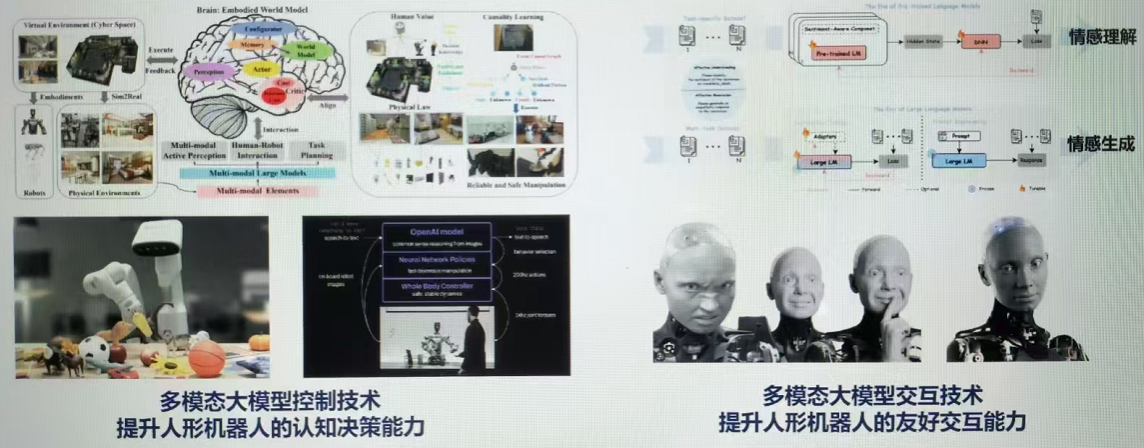
发展趋势与展望:大模型与机器人高级认知-情感-决策融合技术
讲座结束后,蒋志宏教授与师生进行了机器人研究方面的深入交流,并解答了部分师生在机器人学习研究中的一些困惑,使大家获益匪浅。
通过蒋志宏教授的讲座,使得在场的师生对人形机器人以及其关键技术有了新的认识,使得同学们对“人形机器人”充满了兴趣,对我国科技发展充满自信,对自己学习目标更为清晰和有动力。
主办单位:教务处 教师教学发展中心 Betway必威西汉姆联

